2.5.4
DBSCAN
- DBSCAN agrupa puntos en función de la densidad local, lo que permite detectar formas arbitrarias y dejar las regiones poco densas como ruido.
- Dos hiperparámetros dirigen el algoritmo:
eps(radio del vecindario) ymin_samples(número mínimo de vecinos para declarar un punto como núcleo). - Cada muestra se etiqueta como núcleo, borde o ruido; los clústeres son componentes conectadas de puntos núcleo más los bordes que los tocan.
- Una receta habitual es fijar
min_samples(≥ dimensión + 1) y barrerepsmientras se observa el porcentaje de puntos que pasan a ruido.
Intuicion #
Este metodo se entiende mejor al conectar sus supuestos con la estructura de los datos y su efecto en la generalizacion.
Explicacion Detallada #
1. Descripción general #
DBSCAN no necesita conocer cuántos clústeres habrá. Analiza cada punto:
- Puntos núcleo: tienen al menos
min_samplesvecinos a una distancia ≤eps. - Puntos borde: se encuentran dentro del radio
epsde algún núcleo pero no cumplen el criterio por sí mismos. - Ruido: no pertenece al vecindario de ningún núcleo.
Gracias a esta visión basada en densidad, DBSCAN maneja clústeres no convexos (dos lunas, anillos, etc.) y descarta automáticamente zonas dispersas. Escala siempre las variables antes de ajustar.
2. Definición formal #
Para (x_i \in \mathcal{X}), su vecindario (\varepsilon) es
$$ \mathcal{N}_\varepsilon(x_i) = \{ x_j \in \mathcal{X} \mid \lVert x_i - x_j \rVert \le \varepsilon \}. $$Si (|\mathcal{N}_\varepsilon(x_i)| \ge \texttt{min_samples}|), el punto es núcleo. DBSCAN expande clústeres recorriendo puntos alcanzables por densidad y marca como ruido los no visitados. Con un índice espacial la complejidad es (O(n \log n)).
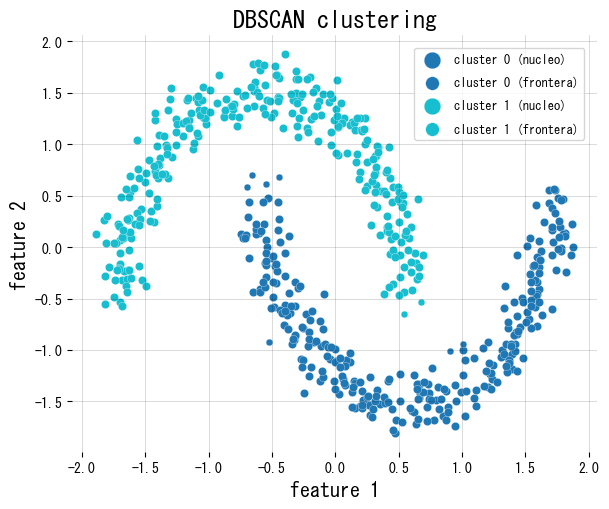
3. Ejemplo en Python #
El siguiente script usa scikit-learn para ejecutar DBSCAN sobre un conjunto de dos lunas con ruido, colorea puntos núcleo/borde y reporta cuántos quedan como ruido.
| |
4. Consejos prácticos #
- Traza el gráfico de distancias ordenadas al k-ésimo vecino (k =
min_samples) y eligeepsdonde aparezca el codo. - Usa pipelines para estandarizar y agrupar en un mismo paso.
- Para conjuntos de datos grandes considera índices de vecinos aproximados o HDBSCAN, que extiende DBSCAN a múltiples densidades y reduce la sensibilidad a
eps.
5. Referencias #
- Ester, M., Kriegel, H.-P., Sander, J., & Xu, X. (1996). A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. KDD.
- Schubert, E., Sander, J., Ester, M., Kriegel, H.-P., & Xu, X. (2017). DBSCAN Revisited, Revisited. ACM Transactions on Database Systems.
- scikit-learn developers. (2024). Clustering. https://scikit-learn.org/stable/modules/clustering.html