5.13.1
Dynamic Time Warping (DTW)
Resumen- DTW alinea dos series temporales permitiendo estiramientos locales del eje temporal para minimizar la distancia acumulada.
- El algoritmo construye una matriz de distancias, calcula costos acumulados mediante programación dinámica y recupera la trayectoria de alineación óptima.
- Implementamos DTW con NumPy, lo comparamos con
fastdtw y visualizamos el camino de warping resultante.
¿Qué es DTW?
#
Dynamic Time Warping mide la similitud entre dos secuencias cuya velocidad o fase inicial puede variar. Encuentra la trayectoria con el menor costo acumulado para alinear ambas secuencias. Se utiliza en reconocimiento de voz, análisis de sensores, y sistemas de recomendación que comparan patrones temporales de uso.
DTW con NumPy
#
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| import numpy as np
def dtw_distance(
x: np.ndarray,
y: np.ndarray,
window: int | None = None,
) -> tuple[float, list[tuple[int, int]]]:
n, m = len(x), len(y)
window = max(window or max(n, m), abs(n - m))
cost = np.full((n + 1, m + 1), np.inf)
cost[0, 0] = 0.0
for i in range(1, n + 1):
for j in range(max(1, i - window), min(m + 1, i + window + 1)):
dist = abs(x[i - 1] - y[j - 1])
cost[i, j] = dist + min(cost[i - 1, j], cost[i, j - 1], cost[i - 1, j - 1])
i, j = n, m
path: list[tuple[int, int]] = []
while i > 0 and j > 0:
path.append((i - 1, j - 1))
idx = np.argmin((cost[i - 1, j], cost[i, j - 1], cost[i - 1, j - 1]))
if idx == 0:
i -= 1
elif idx == 1:
j -= 1
else:
i -= 1
j -= 1
path.reverse()
return cost[n, m], path
|
Comparar tres series
#
1
2
| python --version # ej.: Python 3.13.0
pip install matplotlib fastdtw
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| import matplotlib.pyplot as plt
from fastdtw import fastdtw
np.random.seed(42)
t = np.arange(0, 30)
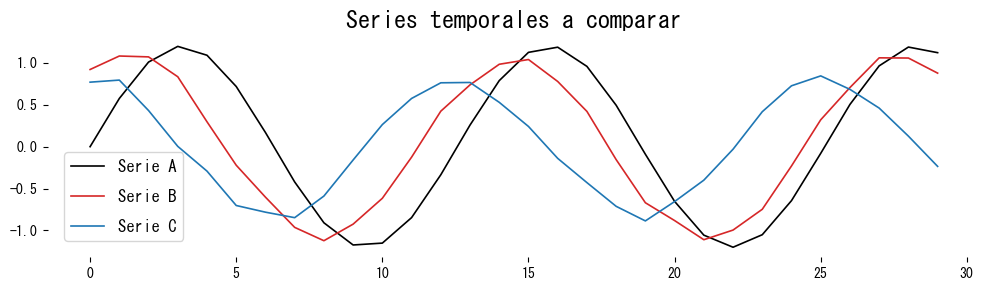
series_a = 1.2 * np.sin(t / 2.0)
series_b = 1.1 * np.sin((t + 2) / 2.1) + 0.05 * np.random.randn(len(t))
series_c = 0.8 * np.cos(t / 2.0) + 0.05 * np.random.randn(len(t))
plt.figure(figsize=(10, 3))
plt.plot(t, series_a, label="Serie A", color="black")
plt.plot(t, series_b, label="Serie B", color="tab:red")
plt.plot(t, series_c, label="Serie C", color="tab:blue")
plt.title("Series temporales a comparar")
plt.legend()
plt.tight_layout()
plt.show()
|
1
2
3
4
5
6
7
8
| dist_ab, path_ab = dtw_distance(series_a, series_b)
dist_ac, path_ac = dtw_distance(series_a, series_c)
fast_dist_ab, _ = fastdtw(series_a, series_b)
fast_dist_ac, _ = fastdtw(series_a, series_c)
print(f"DTW(A, B) = {dist_ab:.3f} / fastdtw = {fast_dist_ab:.3f}")
print(f"DTW(A, C) = {dist_ac:.3f} / fastdtw = {fast_dist_ac:.3f}")
|
La Serie B mantiene una forma similar a la Serie A, por lo que ambas distancias son pequeñas. La Serie C difiere en su forma y genera una distancia mayor.
Visualizar la trayectoria de warping
#
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
| def plot_warping(a: np.ndarray, b: np.ndarray, path: list[tuple[int, int]]) -> None:
fig, axes = plt.subplots(
1,
2,
figsize=(12, 4),
gridspec_kw={"width_ratios": [1, 1.2]},
)
axes[0].plot(a, label="Serie A", color="black")
axes[0].plot(b, label="Serie B", color="tab:red")
axes[0].set_title("Series temporales")
axes[0].legend()
axes[1].imshow(
np.abs(np.subtract.outer(a, b)),
origin="lower",
interpolation="nearest",
cmap="viridis",
)
path_arr = np.array(path)
axes[1].plot(path_arr[:, 1], path_arr[:, 0], color="white", linewidth=2)
axes[1].set_title("Costo acumulado y trayectoria")
axes[1].set_xlabel("Índice Serie B")
axes[1].set_ylabel("Índice Serie A")
plt.tight_layout()
plt.show()
plot_warping(series_a, series_b, path_ab)
|
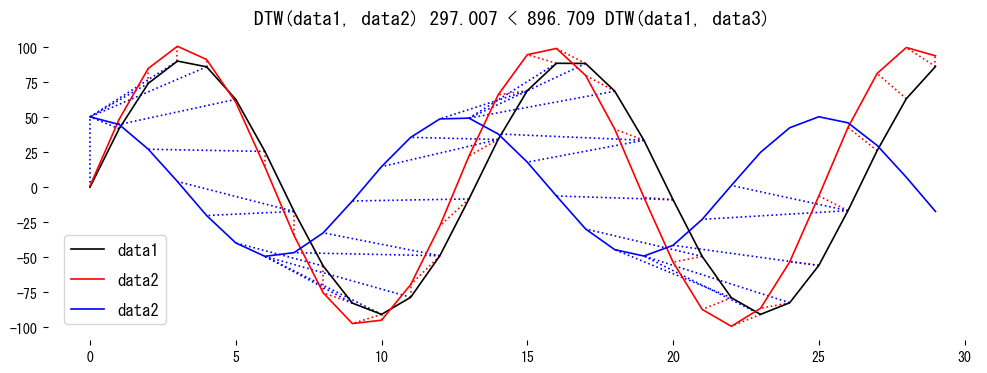
El camino blanco muestra cómo DTW estira o comprime las series para alinear picos y valles aun cuando ocurren en tiempos distintos.
Conclusiones
#
- DTW alinea secuencias con tempo variable minimizando el costo acumulado de una trayectoria de warping.
- La programación dinámica ofrece el camino óptimo; restricciones de ventana o
fastdtw ayudan a acelerar el cálculo. - Con NumPy basta para una implementación básica, y la visualización facilita entender el comportamiento del algoritmo.