5.13.1
Dynamic Time Warping (DTW)
Ringkasan- DTW menyelaraskan dua deret waktu dengan mengizinkan peregangan atau penyusutan lokal pada sumbu waktu untuk meminimalkan jarak.
- Algoritma membangun matriks jarak, menghitung biaya kumulatif dengan pemrograman dinamis, lalu mengambil jalur warping terbaik.
- Kita mengimplementasikan DTW dengan NumPy, membandingkannya dengan
fastdtw, dan memvisualisasikan jalur warping yang dihasilkan.
Apa itu DTW?
#
Dynamic Time Warping mengukur kemiripan antara dua urutan yang bisa memiliki kecepatan atau fase awal berbeda. DTW menemukan jalur dengan biaya kumulatif minimum untuk menyelaraskan dua urutan tersebut. Teknik ini banyak dipakai dalam pengenalan suara, analisis sensor, dan sistem rekomendasi yang memeriksa pola pemakaian sepanjang waktu.
DTW dengan NumPy
#
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| import numpy as np
def dtw_distance(
x: np.ndarray,
y: np.ndarray,
window: int | None = None,
) -> tuple[float, list[tuple[int, int]]]:
n, m = len(x), len(y)
window = max(window or max(n, m), abs(n - m))
cost = np.full((n + 1, m + 1), np.inf)
cost[0, 0] = 0.0
for i in range(1, n + 1):
for j in range(max(1, i - window), min(m + 1, i + window + 1)):
dist = abs(x[i - 1] - y[j - 1])
cost[i, j] = dist + min(cost[i - 1, j], cost[i, j - 1], cost[i - 1, j - 1])
i, j = n, m
path: list[tuple[int, int]] = []
while i > 0 and j > 0:
path.append((i - 1, j - 1))
idx = np.argmin((cost[i - 1, j], cost[i, j - 1], cost[i - 1, j - 1]))
if idx == 0:
i -= 1
elif idx == 1:
j -= 1
else:
i -= 1
j -= 1
path.reverse()
return cost[n, m], path
|
Membandingkan tiga deret
#
1
2
| python --version # contoh: Python 3.13.0
pip install matplotlib fastdtw
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| import matplotlib.pyplot as plt
from fastdtw import fastdtw
np.random.seed(42)
t = np.arange(0, 30)
series_a = 1.2 * np.sin(t / 2.0)
series_b = 1.1 * np.sin((t + 2) / 2.1) + 0.05 * np.random.randn(len(t))
series_c = 0.8 * np.cos(t / 2.0) + 0.05 * np.random.randn(len(t))
plt.figure(figsize=(10, 3))
plt.plot(t, series_a, label="Seri A", color="black")
plt.plot(t, series_b, label="Seri B", color="tab:red")
plt.plot(t, series_c, label="Seri C", color="tab:blue")
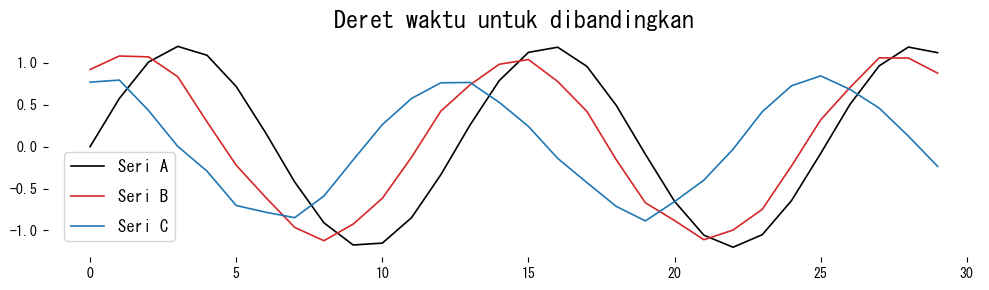
plt.title("Deret waktu untuk dibandingkan")
plt.legend()
plt.tight_layout()
plt.show()
|
1
2
3
4
5
6
7
8
| dist_ab, path_ab = dtw_distance(series_a, series_b)
dist_ac, path_ac = dtw_distance(series_a, series_c)
fast_dist_ab, _ = fastdtw(series_a, series_b)
fast_dist_ac, _ = fastdtw(series_a, series_c)
print(f"DTW(A, B) = {dist_ab:.3f} / fastdtw = {fast_dist_ab:.3f}")
print(f"DTW(A, C) = {dist_ac:.3f} / fastdtw = {fast_dist_ac:.3f}")
|
Seri B bentuknya mirip dengan Seri A sehingga jarak DTW maupun fastdtw kecil. Seri C memiliki bentuk berbeda sehingga jaraknya menjadi lebih besar.
Memvisualisasikan jalur warping
#
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
| def plot_warping(a: np.ndarray, b: np.ndarray, path: list[tuple[int, int]]) -> None:
fig, axes = plt.subplots(
1,
2,
figsize=(12, 4),
gridspec_kw={"width_ratios": [1, 1.2]},
)
axes[0].plot(a, label="Seri A", color="black")
axes[0].plot(b, label="Seri B", color="tab:red")
axes[0].set_title("Deret waktu")
axes[0].legend()
axes[1].imshow(
np.abs(np.subtract.outer(a, b)),
origin="lower",
interpolation="nearest",
cmap="viridis",
)
path_arr = np.array(path)
axes[1].plot(path_arr[:, 1], path_arr[:, 0], color="white", linewidth=2)
axes[1].set_title("Biaya kumulatif dan jalur warping")
axes[1].set_xlabel("Indeks Seri B")
axes[1].set_ylabel("Indeks Seri A")
plt.tight_layout()
plt.show()
plot_warping(series_a, series_b, path_ab)
|

Jalur putih menunjukkan bagaimana DTW meregangkan atau menyusutkan kedua deret sehingga titik-titik penting sejajar meskipun tidak terjadi pada waktu yang sama.
Ringkasan
#
- DTW menyelaraskan deret dengan tempo berbeda dengan meminimalkan biaya kumulatif jalur warping.
- Pemrograman dinamis menyediakan jalur optimal; batasan jendela atau
fastdtw membantu mempercepat perhitungan. - NumPy sudah cukup untuk implementasi dasar, dan visualisasi jalur memudahkan memahami perilaku DTW.